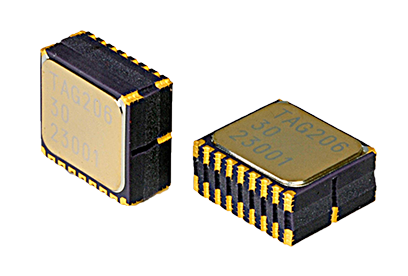
TAMGAWA SEIKI의 소형3축관성센서 MEMS IMU는 3축 각속도 및 3축 가속도를 감지 및 출력할 뿐만 아니라 자세각(롤 및 피치)과 방위각(yaw)도 계산 및 출력합니다. 기존 관성 계측 장치와 비교하여 낮은 가격이면서 자동차 및 드론, 농사업 기기 등의 자율 주행에 대응할 수 있는 우수한 기능성이 특징입니다.
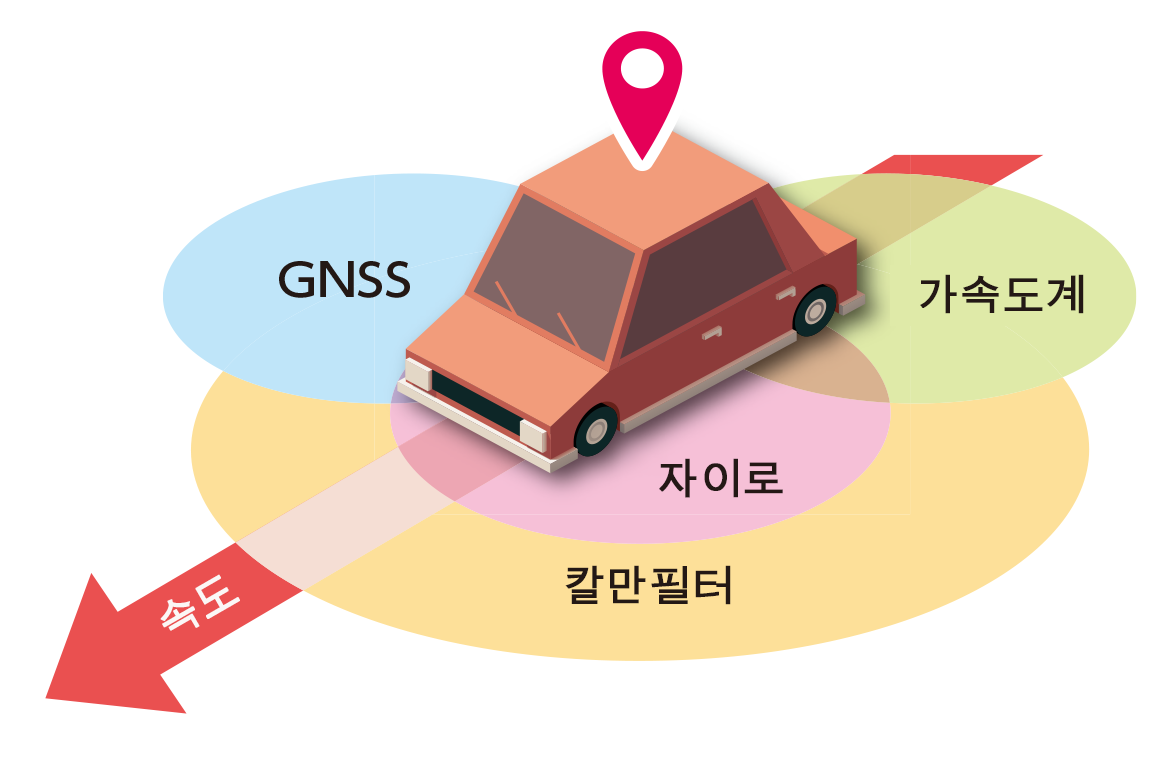

외부 GNSS 접속이 가능한 기판 타입

IP65 대응의 방수케이스 타입

컴팩트 사이즈의 케이스 타입 (방수 X)



Motor / Sensor / Gyro / Brake