Warning: session_start(): open(/tmp/sess_j29tda9fftjc2qigmn4kdbugts, O_RDWR) failed: Disk quota exceeded (122) in /www_root/wp-content/plugins/kboard/index.php on line 78
Warning: session_start(): Failed to read session data: files (path: ) in /www_root/wp-content/plugins/kboard/index.php on line 78 앱솔루트 엔코더(멀티턴)-Enicx Corporation
Menu
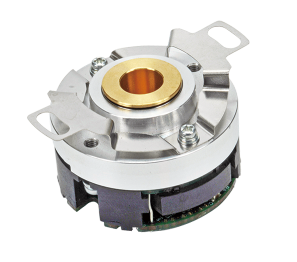
TAMAGAWA SEIKI ABSOLUTE ENCODER 앱솔루트 엔코더 -멀티턴-
회전각도의 절대치를 출력할 수 있는 타마가와 앱솔루트 엔코더입니다. 타마가와의 멀티턴 앱솔루트 엔코더는 1회전을 초과한 360˚이상의 회전량에 대한 검출이 가능합니다.
절대치 엔코더(앱솔루트 엔코더)는 회전각의 절대치를 출력하는 엔코더입니다. 공작기기, 로봇 등에 장착된 서보모터의 위치제어에 사용되고 있습니다. 회전 슬릿은 동심원 패턴으로 나열되어 있으며 샤프트가 회전하면서 생성된 고유 패턴으로 정확한 위치를 알 수 있습니다. 전원off에서도 절대 위치 값을 유지할 수 있으며 멀티턴 앱솔루트 엔코더의 경우 1회전을 초과하는 회전량을 기록할 수 있습니다.